
 产品:34
产品:34
 联系我们
联系我们

机器人操作的定义是通过某个机构在空间上移动部件和工具,需要自然地表现部件、工具、机构自身的位置和姿势。为了定义和运用表现电位的数学量,必须定义坐标系,给出表现的规则。
我们存在世界坐标系,我们定义的姿势都采用了参照由世界坐标系或世界坐标系定义的笛卡尔坐标系的系统。

每根轴逐个沿正向和负向
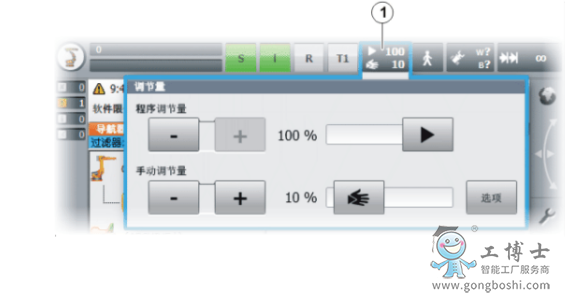
为此需要使用移动键或者 KUKA smartPAD 的 3D 鼠标。
速度可以更改 (手动倍率: HOV)
仅在 T1 运行模式下才能手动移动。
确认键必须已经按下。
操作步骤: 执行按轴坐标的运动
1. 选择 轴作为移动键的选项。

4. 按下正或负移动键,以使轴朝正方向或反方向运动。
以上内容来源于网络:
侵权删
更多机器人咨询请咨询:库卡机器人

- 下一篇:暂无
- 上一篇:KUKA:如何在程序中加入寄存器指令